

Recent onderzoek naar autonome voertuigen heeft aangetoond dat een bestuurder zo’n 10 seconden nodig heeft om terug over te stappen op een actieve, ‘manuele’ manier van rijden nadat hij of zij zich op een andere activiteit had geconcentreerd tijdens de autonome modus. In die overgangsperiode moet de auto blijven rijden en de veiligheid van zijn passagiers blijven verzekeren. Daarom zijn extreem precieze wegenkaarten nodig en moeten voertuigen onderling en met de infrastructuur kunnen communiceren. Dat is één van de assen van het Duitse project Ko-HAF (Kooperatives hochautomatisiertes Fahren of coöperatief en sterk geautomatiseerd rijden).
Prototype van Opel
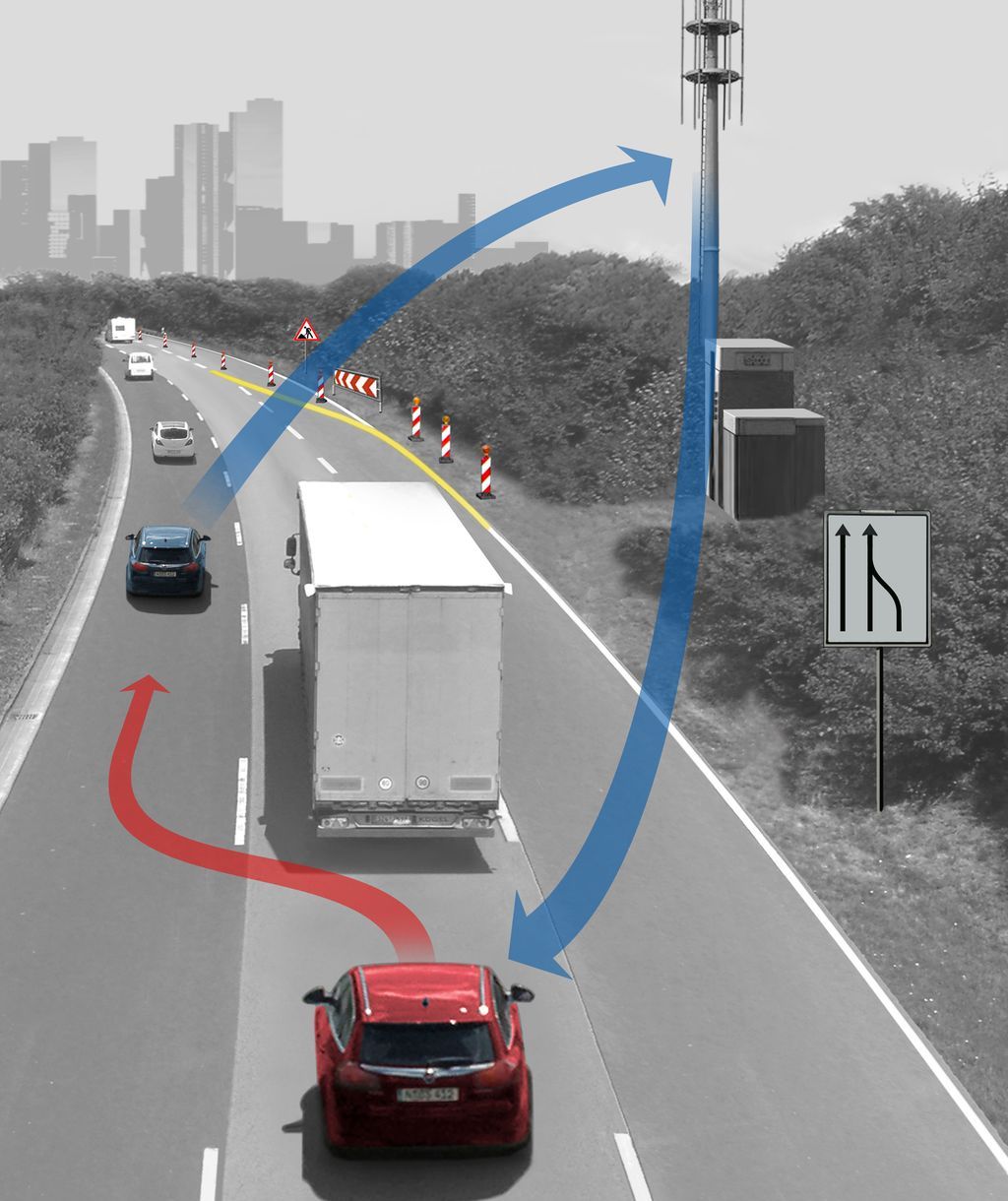 In het kader van dit onderzoeksprogramma gaat Opel een prototype ontwikkelen om autonoom rijden op de openbare weg te onderzoeken. De auto zal automatisch op de snelweg moeten invoegen, zich integreren in de verkeersstroom, op de snelweg rijden met inhaalmanoeuvers en, ten slotte, vanzelf weer van de snelweg af gaan. De auto zal met een server communiceren die de nodige gegevens verzamelt. Hij stuurt er zelf de informatie naartoe die hij verzamelt met zijn sensoren en ontvangt die van andere voertuigen in de omgeving via een gestandaardiseerd communicatieprotocol.
In het kader van dit onderzoeksprogramma gaat Opel een prototype ontwikkelen om autonoom rijden op de openbare weg te onderzoeken. De auto zal automatisch op de snelweg moeten invoegen, zich integreren in de verkeersstroom, op de snelweg rijden met inhaalmanoeuvers en, ten slotte, vanzelf weer van de snelweg af gaan. De auto zal met een server communiceren die de nodige gegevens verzamelt. Hij stuurt er zelf de informatie naartoe die hij verzamelt met zijn sensoren en ontvangt die van andere voertuigen in de omgeving via een gestandaardiseerd communicatieprotocol.
Programmeerwerk
Opel werkt verder eveneens mee aan het uitwerken van algoritmes die worden gebruikt in het “proces van het autonoom lokaliseren van het voertuig”. Die moeten informatie van de wegenkaart en van de visuele lokalisering combineren met die van de bewegingssensoren en die van het wereldwijde satellietnavigatiesysteem (GNSS). Bovendien werken de ingenieurs van de Duitse constructeur aan een systeem dat met sensoren werkt om de daden van de bestuurder in de gaten te houden tijdens het ‘automatisch’ rijden. Dat moet de reacties van de bestuurder voorzien wanneer hij de controle over het voertuig moet overnemen.


Nieuws





